СИСТЕМА ОПЕРАТИВНОГО УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ ПОДВИЖНОГО ОБЪЕКТА Российский патент 2022 года по МПК B64C13/04 B64D31/04 G05B15/00 B60K37/00
Изобретение позволяет обеспечить оперативное управление оборудованием подвижного объекта.
В качестве подвижного объекта рассматривается любой современный летательный аппарат (ЛА), где проблема оперативного управления комплексом бортового оборудования (КБО) и различными типами авиационных средств поражения (АСП) стоит особенно остро.
В современных ЛА, оснащенных многочисленными обзорно-прицельными средствами (ОПС), обеспечивающих применение широкой номенклатуры АСП и выполняющих различные режимы их доставки, в кабине установлены многочисленные органы управления (ОУ), реализующие управление этими системами и режимами на фоне управления ЛА.
Для управления ЛА используются рукоятка управления положением летательным аппаратом (РУС) и рукоятка управления двигателем (РУД), а для управления КБО и АСП органы управления на боковых, в ряде случаев на центральном, пультах кабины. В ЛА последних поколений эти ОУ располагаются на кнопочном обрамлении экранов индикаторов.
Таким образом, для управления КБО и АСП оператору необходимо снять руки с ОУ ЛА, тем самым теряя контроль над ЛА. При этом необходимо отметить, что время активирования ОУ, расположенного на борту или приборной доске в кабине в несколько раз больше по времени, чем нажатие ОУ на рукоятках управления. Кроме того процедура управления КБО и АСП зачастую осложняется проблемой досягаемости до этих ОУ.
Для минимизации негативных последствий данной ситуации на всех современных ЛА на РУС и РУД устанавливаются ОУ для выдачи наиболее важных и оперативных команд управления КБО и АСП. Количество команд управления ограниченно, так как установка большого количества ОУ на РУС и РУД, приводит к увеличению размеров рукояток, затруднениям в работе с этими ОУ и возрастанию ошибочных действий летчика, особенно на экстремальных режимах и при боевом применении.
Таким образом, раздельное управление КБО и ЛА, когда при управлении КБО теряется контроль над ЛА, приводит к снижению боевой эффективности военных ЛА, особенно в дуэльных ситуациях, а также к росту предпосылок летных происшествий.
Известен «Автоматизированный способ дистанционного управления бортовым комплексом и системами ЛА» (патент RU №2137678, МПК: В64С 13/18, пр. 23.03.1998). Изобретение относится к авиации и может быть использовано для дистанционного управления оператором бортовым комплексом и системами ЛА (без отрыва рук от рычагов управления ЛА). В процессе управления оператору непрерывно «подсказываются» действия в соответствии с заранее запрограммированной иерархической последовательностью их выполнения. Для перевыбора запрограммированных ранее действий используется подвижный маркер, дистанционно перемещаемый по знакоместам обозначения многофункциональных кнопок на экране нажатием на переключатель «перевыбор» в стороны (влево, вправо, вверх, вниз) или с циклическим перебором функции многофункциональной кнопки нажатием на переключатель «перевыбор» прямо. В случае согласия с рекомендованными или ранее перевыбранными летчиком действиями для их исполнения он нажимает отдельную кнопку «согласие». Повышается производительность, точность, рациональность и безошибочность действий летчика, а также повышается точность пилотирования и безопасность полета в целом.
Для нажатия многофункциональной кнопки на периферии индикатора оператор снимает руку с рычага. Циклический перебор большого числа функций на экране индикатора требует высокой концентрации внимания оператора и, как следствие, чреват запаздыванием и ошибками управления, что ограничивает возможность использования способа.
Наиболее близким техническим решением к заявляемому является «Способ и система управления» (патент № RU 2240956, МПК: В64С 13/00, пр. 25.07.2002) в соответствии с которыми функционирование и режимы работы управляемых систем изменяют воздействием на многофункциональные тактильные органы, которые расположены на комплексных органах управления под кистями рук оператора. Амплитуда движения рук при этом незначительна. Изменение функций многофункциональных тактильных органов определяется воздействием оператора на тактильные переключатели. ЭВМ формирует команды на средства непосредственного управления системами, расположенные вне рабочего места оператора. Средства непосредственного управления бортовыми системами через их соответствующие вычислительно-логические элементы электрически связаны с пультовыми тактильными органами неоперативного управления. После отображения на визуальном индикаторе схематических изображений многофункциональных органов с видеоинформацией о возможных функциях этих органов при определении задачи или ситуации управления, вариантов функционирования и режимов работы управляемых систем поочередно воздействуют пальцами рук оператора на тактильные переключатели и многофункциональные тактильные органы до завершения настройки управляемых систем на требуемые варианты их функционирования и режимы работы. При этом руководствуются видеоинформацией об изменяемых положении и функциях многофункциональных тактильных органов. Система обеспечивает повышенную надежность, удобство и комфортность управления.
Функциональное назначение многофункциональных органов управления на РУС и РУД по патенту RU №2240956 определяется воздействием оператора на ОУ, размещенные в кабине оператора, для чего ему необходимо снимать руки с рукояток управления летательным аппаратом и двигателем. В ряде случаев ОУ могут находиться вне пределов легкой функциональной досягаемости, что затрудняет работу оператора при выполнении данных операций. При этом оператор отвлекается от обзора окружающей обстановки и теряет контроль над объектом.
Система управления по патенту RU №2240956 не может обеспечить управление сложными многофункциональными объектами, так как количество задач в каждом режиме работы не может быть более шести.
Это определено логикой работы многофункциональных ОУ. После выбора одной задачи многофункциональные ОУ автоматически переходят на управление этой задачей.
Задание числового значения параметра требует большого количества операций и значительных временных затрат, т.к. каждая цифра выбирается из перечня цифр с необходимостью фиксации каждой выбранной цифры.
На двухпозиционный переключатель на РУД оператор воздействует безымянным пальцем левой руки, что крайне неудобно и противоречит требованиям эргономики. В соответствии с ГОСТ 22614-77 воздействие на ОУ должно осуществляться большим и указательным пальцами рук оператора.
Задачей заявляемого изобретения является обеспечение оперативного управления оборудованием подвижного объекта.
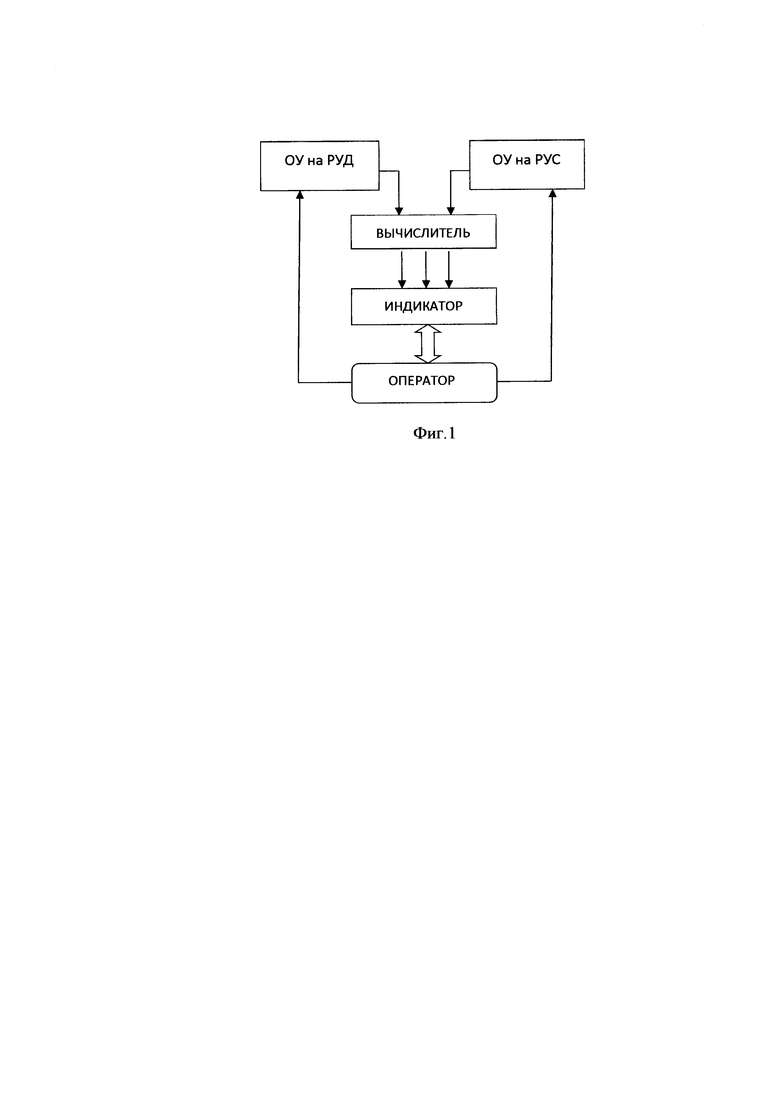
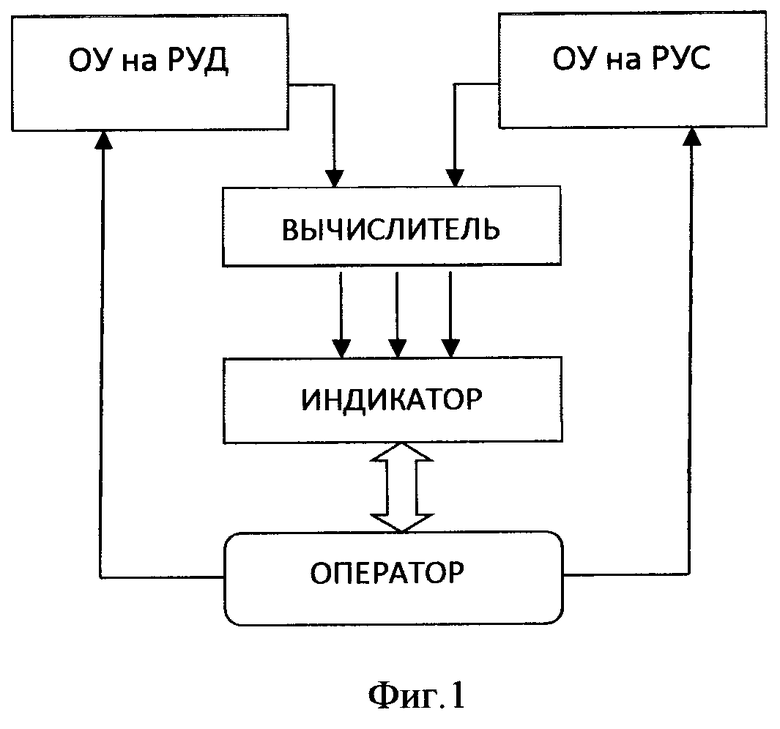
Для решения поставленной задачи предложена система оперативного управления оборудованием подвижного объекта, позволяющая осуществлять все действия по управлению без отрыва рук от рукояток управления подвижным объектом. Система включает в себя четырехпозиционный переключатель с осевым нажатием (4ПП-правый), установленный на рукоятке управления положением подвижного объекта и четырехпозиционный переключатель с осевым нажатием (4ПП-левый), установленный на рукоятке управления двигателем под правую и левую руку оператора соответственно, экран индикатора, информирующий о функциональном назначении обоих 4ПП и результатах действий оператора по управлению, вычислитель, который придает обоим 4ПП функции выбора задач управления оборудованием подвижного объекта и после выбора требуемой задачи по нажатию центральной кнопки любого 4ПП придает обоим 4ПП функции задания команд управления выбранной задачи, а после завершения решения задачи нажатием центральной кнопки любого 4ПП возвращает оба 4ПП к выбору следующей задачи управления, формируя при этом на экране индикатора информацию о текущем функциональном назначении обоих 4ПП и результатах управления.
В случае, когда оборудование подвижного объекта имеет сложную структуру, где количество задач управления велико, формируется два блока задач, для чего меняется назначение центральных кнопок обоих 4ПП, где при нажатии центральной кнопки 4ПП-правый осуществляется переход от задач к командам управления выбранной задачи и вновь осуществляется переход от команд управления к перечню задач по нажатию центральной кнопки 4ПП-правый, а при нажатии центральной кнопки 4ПП — левый осуществляется переход от одного блока задач к другому и обратно при повторном нажатии центральной кнопки 4ПП-левый.
На рукоятке управления двигателем расположена кнопка переключения режимов управления, которая нажимается и удерживается в нажатом состоянии в случае, если при решении ранее выбранной задачи требуется подача команды из перечня команд другой задачи, по сигналу с этой кнопки 4ПП-правый приобретает функции задания наиболее используемых команд, после выбора которых, кнопка переключения режимов управления отпускается и оба 4ПП приобретают функции, которые были до нажатия кнопки переключения режимов управления. На рукоятке управления двигателем расположена кнопка переключения режимов управления и кнопка фиксации действий оператора, на рукоятке управления положением подвижного объекта установлена кнопка отмены действий оператора и в случае, когда в вычислитель поступает сигнал от нажатой кнопки переключения режимов управления, то вычислитель придает обоим 4ПП функции наборного поля, а кнопкам в обрамлении индикатора присваивает индицируемый на экране двухзначный цифровой код, при наборе которого с использованием двух 4ПП, аббревиатура кнопки обозначается рамкой, которая работает в проблесковом режиме и после нажатия кнопки фиксации действий оператора, кнопка в обрамлении индикатора активируется, а при ошибочном наборе цифрового кода, он сбрасывается нажатием кнопки отмены действий оператора, при повторном нажатии кнопки переключения режимов управления оба 4ПП приобретают функции оперативного управления оборудованием подвижного объекта.
Применительно к подвижному объекту типа ЛА система позволяет обеспечить управление КБО и применение всех видов АСП без снятия рук с РУС и РУД.
Сущность предлагаемого изобретения поясняется чертежами:
Фигура 1 — структура предлагаемой системы оперативного управления КБО и АСП.
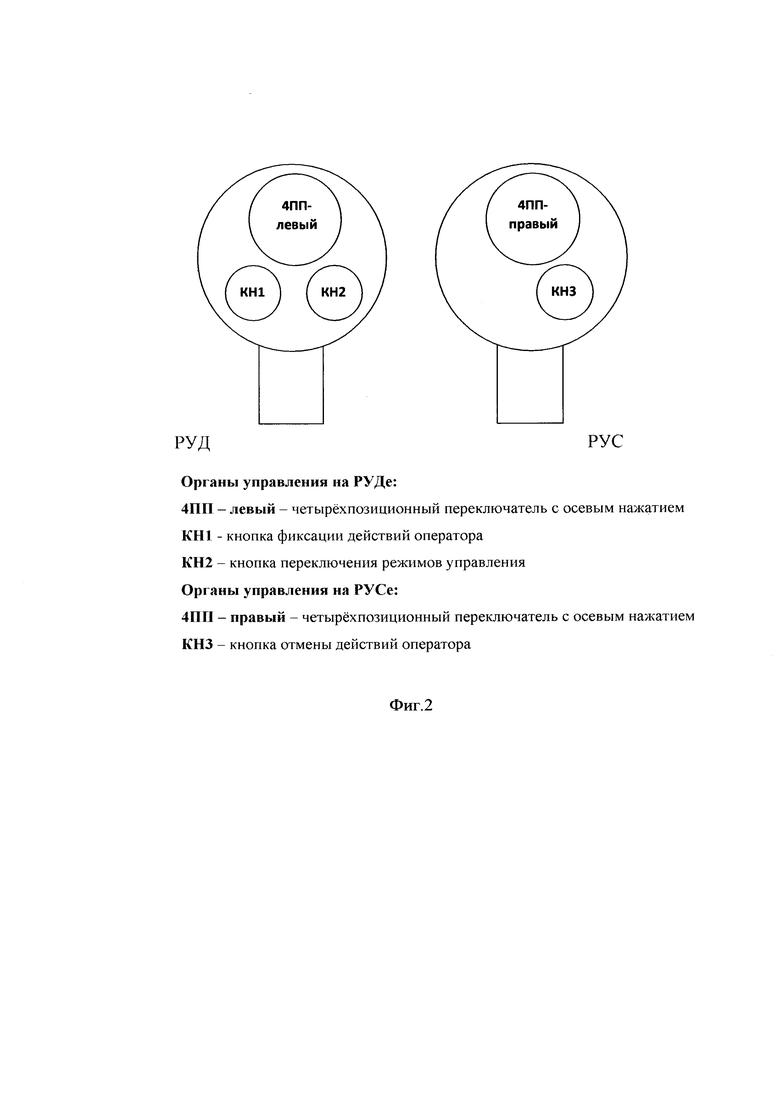
Фигура 2 — РУД и РУС с расположенными на них ОУ.
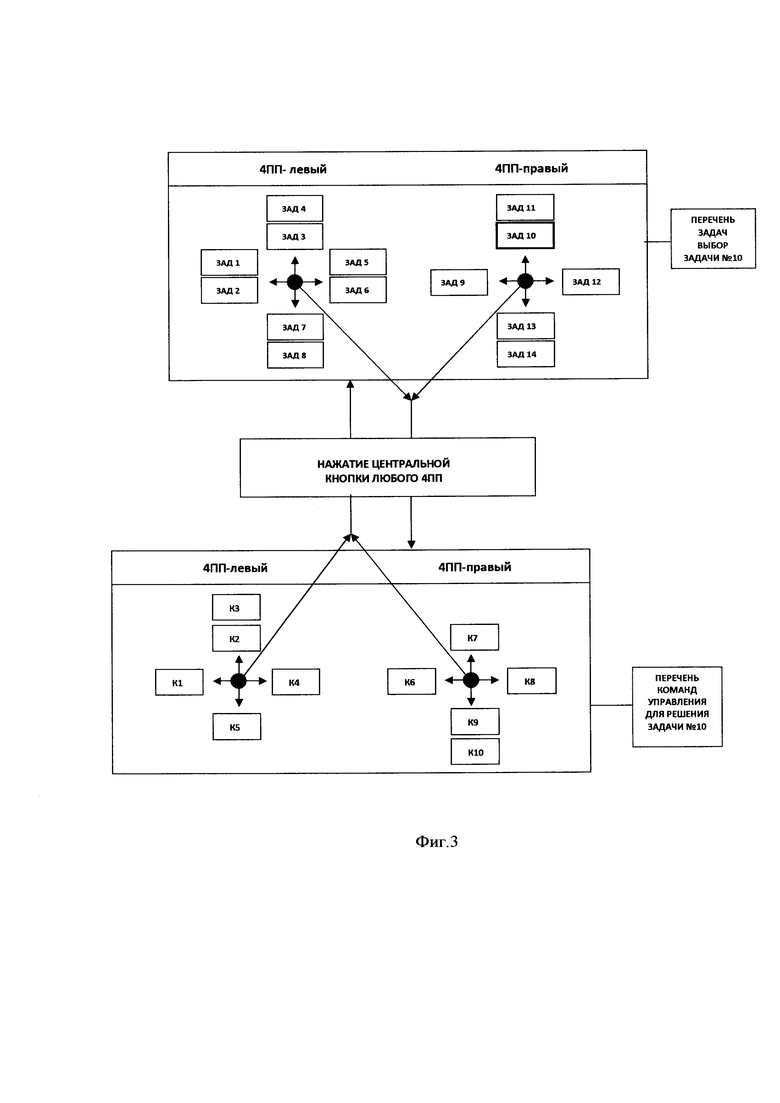
Фигура 3 — схема перехода двух 4ПП на задание команд для предварительно выбранной задачи.
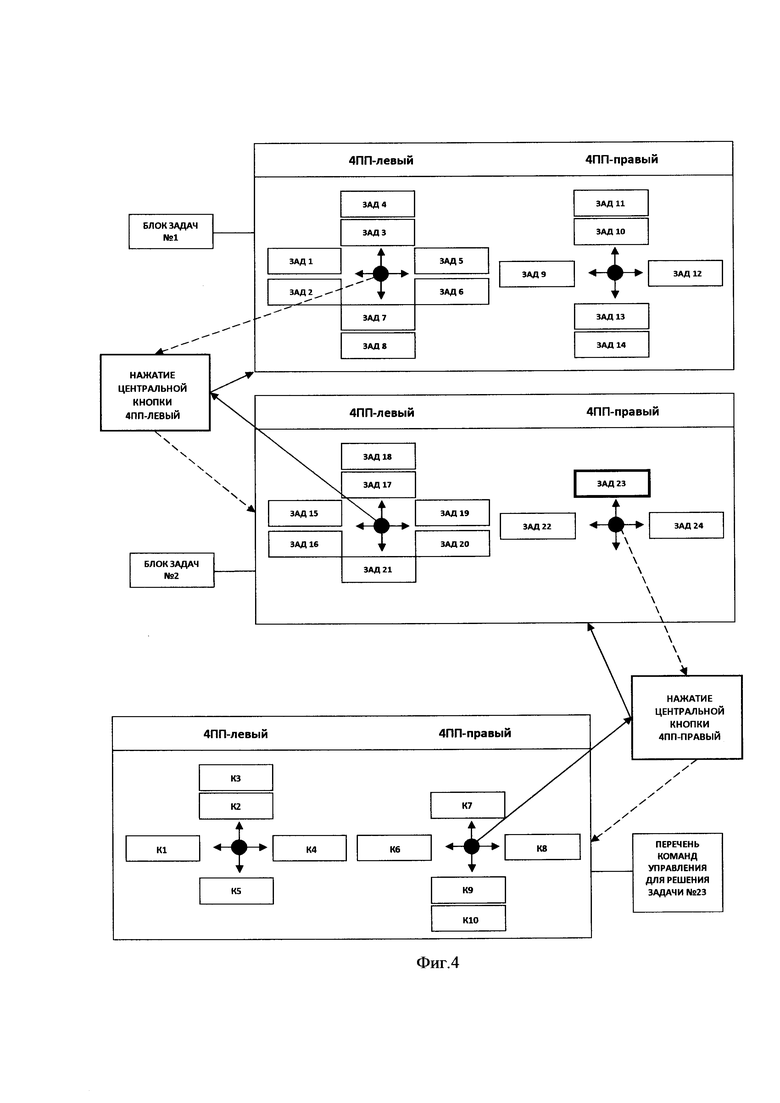
Фигура 4 — схема использования двух блоков задач.
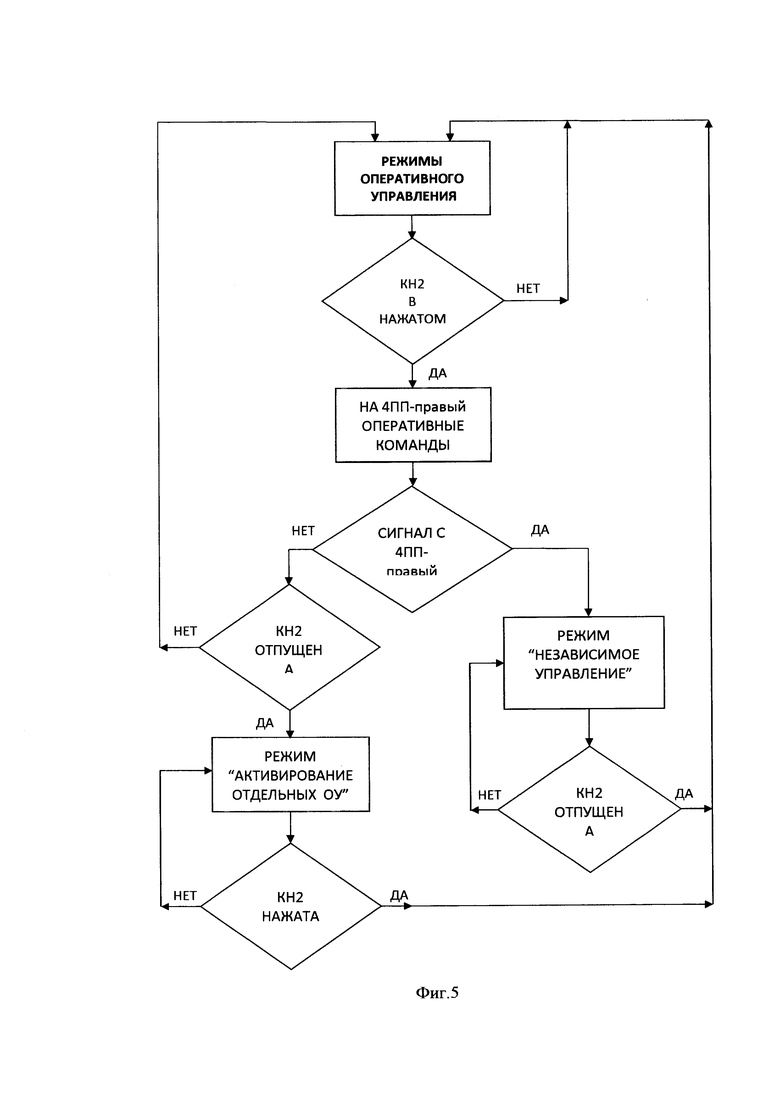
Фигура 5 — схема переключения режимов оперативного управления.
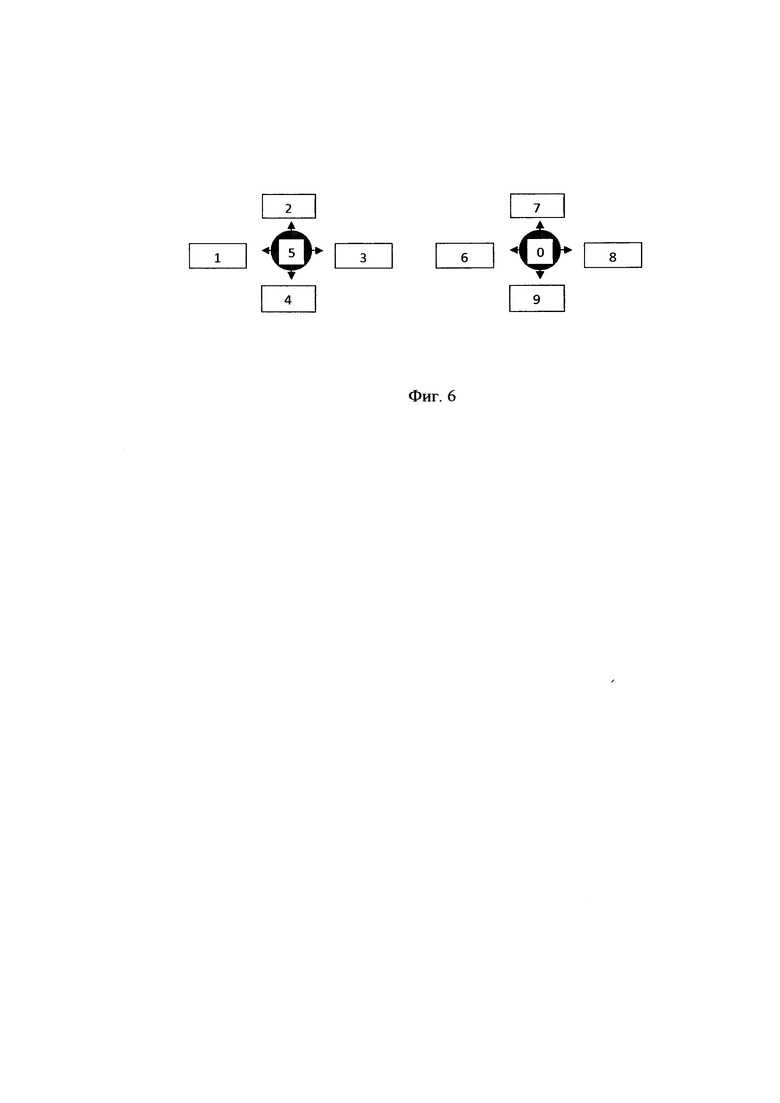
Фигура 6 — реализация на обоих 4ПП наборного поля для задания цифрового кода органа управления в кнопочном обрамлении индикатора. Режим управления — «активирование отдельных ОУ».
Система оперативного управления КБО ЛА и АСП работает следующим образом.
На экране индикатора высвечиваются два графических объекта в виде прямоугольного креста, каждый со стрелками на концах, которые указывают направление движения исполнительного элемента (ИЭ) каждого 4ПП.
Над каждой стрелкой изображаются названия задач, определяющих управление КБО и АСП.
Двигая ИЭ 4ПП по направлению, указанному стрелкой, оператор перемещает рамку выбора, выбирая тем самым необходимую для решения в данный момент задачу.
При движении ИЭ и его контакта с концевым переключателем сигнал с концевого переключателя 4ПП поступает в вычислитель, где, в соответствии с моделью каждого 4ПП, формируется положение рамки выбора.
При последовательном нажатии на ИЭ в одном направлении перемещение рамки выбора осуществляется по круговой схеме. После выбора последней задачи в данном ряду, следующее нажатие возвращает рамку выбора на первую задачу в данном ряду. Выбор задач в каждом направлении осуществляется по принципу работы галетного переключателя, что обеспечивает выбор только одной задачи.
После выбора необходимой задачи оператор нажимает центральную кнопку любого 4ПП. Этот сигнал поступает в вычислитель, где каждой задаче поставлены в соответствие перечень команд решения этой задачи.
После нажатия центральной кнопки любого 4ПП оба 4ПП приобретают функции выбора этих команд.
На экране индикатора высвечивается изображение двух 4ПП с перечнем команд.
Оператор движением ИЭ 4ПП перемещает рамку выбора по ряду команд в каждом направлении. Выбор команд проводится так же, как и выбор задач по принципу работы галетного переключателя, что позволяет выбрать в каждом направлении одну команду, которая определяется последним нажатием ИЭ.
Команды, созданной модели решения задачи, поступают в вычислитель и после преобразования транслируются в системы, управляемые вычислителем.
Таким образом, осуществляется выбор решаемой задачи, а далее подбор соответствующего ей набора команд. На Фиг. 3 схематично показан пример перехода от выбранной задачи на команды управления для данной задачи.
Повторное нажатие центральной кнопки любого 4ПП поступает в вычислитель, который вновь формирует на экране индикатора изображение 4ПП с перечнем задач.
В случае управления сложными по своей структуре комплексами, где необходимо решение большого количества задач, реализуется использование двух блоков задач. При этом меняются функции центральных кнопок 4ПП.
По нажатию центральной кнопки 4ПП-левый, сигнал от нее поступает в вычислитель, который меняет функциональное назначение двух 4ПП, обеспечивая выбор задач управления из второго блока задач. На индикаторе появляется изображение двух 4ПП с новым перечнем задач.
Нажатие центральной кнопки 4ПП-правый осуществляет переход от задачи, выбранной из любого блока задач, к командам управления, выбранной задачи и обратно, при повторном нажатии центральной кнопки 4ПП-правый (Фиг. 4).
Возможны ситуации, когда оператор занят процессом выбора команд для решения текущей задачи, а необходимость требует подать команду из перечня команд другой задачи.
Чтобы избежать многоуровневого пути решения этой проблемы, включающего выход из решаемой задачи путем назначения другой задачи, выдачу необходимой команды; возврат к решению первоначальной задачи, предлагается режим управления — «независимое управление» (Фиг. 5).
Перечень команд, которые подаются независимо от решаемой задачи, как правило, невелик и обычно заранее предполагается.
Режим «независимое управление» реализуется следующим образом. Оператор на РУД нажимает и удерживает в нажатом состоянии кнопку переключения режимов управления. Этот сигнал поступает в вычислитель, в котором формируется новое функциональное назначение 4ПП-правый, отображаемое на экране индикатора. Это новое назначение 4ПП-правый включает ряд наиболее востребованных команд, подача которых требует оперативности.
После выбора необходимых команд, оператор отпускает кнопку переключения режимов управления. По этому сигналу фиксируются и подаются в вычислитель выбранные команды, а функциональное состояние 4ПП-правый и 4ПП-левый возвращается к тому, которое было до нажатия кнопки переключения режимов управления.
В случае необходимости активировать ОУ в кнопочном обрамлении индикатора из числа ОУ, не принадлежащих к одной системе или режиму, а являющихся набором отдельных, не связанных между собой ОУ, вводится режим управления — «активирование отдельных ОУ» (Фиг. 5). Этот режим реализуется следующим образом. При кратковременном нажатии кнопки переключения режимов управления оба 4ПП выходят из режима оперативного управления КБО и АСП и на них реализуется наборное поле (Фиг. 6). На экране индикатора отображается новое назначение обоих 4ПП, а кнопки в обрамлении индикатора получают цифровой код, который индицируется на экране рядом с кнопкой.
После набора оператором цифрового кода, аббревиатура кнопки обозначается рамкой, которая работает в проблесковом режиме. Если код набран правильно и выбрана необходимая кнопка, оператор нажимает кнопку фиксации действий оператора на РУД. Обрамление аббревиатуры кнопки загорается постоянным светом и команда от данной кнопки поступает в вычислитель.
При ошибочном наборе цифрового кода, он сбрасывается нажатием кнопки отмены действий оператора. При повторном нажатии кнопки переключения режимов управления оба 4ПП приобретают функции оперативного управления КБО ЛА и АСП.
Реализация системы оперативного управления оборудованием подвижного объекта позволяет:
— обеспечить управление структурно сложных комплексов оборудования без снятия рук оператора с рукояток управления подвижного объекта;
— реализовать различные способы оперативного управления в зависимости от ситуации;
— повысить оперативность управления оборудованием подвижного объекта за счет минимизации переноса рук, использования режима «независимого управления», наличия понятного названия команд и простого алгоритма управления;
— обеспечить управление сложными комплексами, формируя порядка 20-30 задач, даже при одном блоке задач, выбор которых осуществляется без использования отдельных внешних переключателей, не входящих в состав системы;
— обеспечить воздействие на оперативные ОУ большим и указательным пальцами левой и правой рук без применения других пальцев, что соответствует требованиям эргономики.
Похожие патенты RU2773989C1
- Безверхний В.Б.
- Коржуев М.В.
- Малов Ю.И.
- Моржин А.М.
- Писков В.В.
- Федоров А.И.
- Деревянкин В.П.
- Кучерявый А.А.
- Макаров Н.Н.
- Ефанов Василий Васильевич
- Баранов Александр Сергеевич
- Бекетов Владимир Игоревич
- Бобров Сергей Викторович
- Грибов Дмитрий Игоревич
- Давиденко Александр Николаевич
- Демин Игорь Михайлович
- Максаков Константин Павлович
- Машков Николай Анатольевич
- Погосян Михаил Асланович
- Поляков Виктор Борисович
- Баранов Александр Сергеевич
- Бекетов Владимир Игоревич
- Герасимов Алексей Анатольевич
- Грибов Дмитрий Игоревич
- Давиденко Александр Николаевич
- Лякин Алексей Александрович
- Максаков Константин Павлович
- Машков Николай Анатольевич
- Петров Вячеслав Владимирович
- Погосян Михаил Асланович
- Поляков Виктор Борисович
- Сапогов Вадим Александрович
- Стрелец Михаил Юрьевич
- Тучинский Михаил Леонидович
- Парамонов П.П.
- Копорский Н.С.
- Виноградов Ю.Н.
- Сабо Ю.И.
- Демченко О.Ф.
- Попович К.Ф.
- Школин В.П.
- Никитин В.Н.
- Перминов А.Г.
- Кодола В.Г.
- Ефанов А.Г.
- Демченко О.Ф.
- Попович К.Ф.
- Школин В.П.
- Суслов В.Д.
- Таскаев Р.П.
- Перминов А.Г.
- Никитин В.Н.
- Сорокин В.Ф.
- Погосян Михаил Асланович
- Давиденко Александр Николаевич
- Стрелец Михаил Юрьевич
- Поляков Виктор Борисович
- Грибов Дмитрий Игоревич
- Баранов Александр Сергеевич
- Бобров Сергей Викторович
- Безяев Виктор Степанович
- Васильев Анатолий Дмитриевич
- Губарьков Игорь Семёнович
- Козлов Игорь Львович
- Коновалова Марина Яковлевна
- Логунова Татьяна Николаевна
- Пархоменко Олег Леонидович
- Северин Валерий Александрович
- Ширяев Александр Сергеевич
Иллюстрации к изобретению RU 2 773 989 C1
Реферат патента 2022 года СИСТЕМА ОПЕРАТИВНОГО УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ ПОДВИЖНОГО ОБЪЕКТА
Система оперативного управления оборудованием подвижного объекта содержит два четырехпозиционных переключателя с осевым нажатием (4ПП), один из которых установлен на рукоятке управления положением подвижного объекта, а другой – на рукоятке управления двигателем под правую и левую руку соответственно, экран индикатора, вычислитель, выполненная с возможностью выбора задач управления оборудованием подвижного объекта и выполнения их с помощью соответствующих 4ПП. Обеспечивается повышение оперативности управления без отрыва рук от рукояток управления. 3 з.п. ф-лы, 6 ил.
Формула изобретения RU 2 773 989 C1
1. Система оперативного управления оборудованием подвижного объекта, позволяющая осуществлять все действия по управлению без отрыва рук от рукояток управления подвижным объектом, отличающаяся тем, что система включает в себя четырехпозиционный переключатель с осевым нажатием (4ПП-правый), установленный на рукоятке управления положением подвижного объекта и четырехпозиционный переключатель с осевым нажатием (4ПП-левый), установленный на рукоятке управления двигателем под правую и левую руку оператора соответственно, экран индикатора, информирующий о функциональном назначении обоих 4ПП и результатах действий оператора по управлению, вычислитель, который придает обоим 4ПП функции выбора задач управления оборудованием подвижного объекта и после выбора требуемой задачи по нажатию центральной кнопки любого 4ПП придает обоим 4ПП функции задания команд управления выбранной задачи, а после завершения решения задачи нажатием центральной кнопки любого 4ПП возвращает оба 4ПП к выбору следующей задачи управления, формируя при этом на экране индикатора информацию о текущем функциональном назначении обоих 4ПП и результатах управления.
2. Система по п. 1, отличающаяся тем, что в случае, когда оборудование подвижного объекта имеет сложную структуру, где количество задач управления велико, формируется два блока задач, для чего меняется назначение центральных кнопок обоих 4ПП, где при нажатии центральной кнопки 4ПП-правый осуществляется переход от задач к командам управления выбранной задачи и вновь осуществляется переход от команд управления к перечню задач по нажатию центральной кнопки 4ПП-правый, а при нажатии центральной кнопки 4ПП-левый осуществляется переход от одного блока задач к другому и обратно при повторном нажатии центральной кнопки 4ПП-левый.
3. Система по п. 1, отличающаяся тем, что на рукоятке управления двигателем расположена кнопка переключения режимов управления, которая нажимается и удерживается в нажатом состоянии в случае, если при решении ранее выбранной задачи требуется подача команды из перечня команд другой задачи, по сигналу с этой кнопки 4ПП-правый приобретает функции задания наиболее используемых команд, после выбора которых кнопка переключения режимов управления отпускается и оба 4ПП приобретают функции, которые были до нажатия кнопки переключения режимов управления.
4. Система по п. 1, отличающаяся тем, что на рукоятке управления двигателем расположена кнопка переключения режимов управления и кнопка фиксации действий оператора, на рукоятке управления положением подвижного объекта установлена кнопка отмены действий оператора и в случае, когда в вычислитель поступает сигнал от нажатой кнопки переключения режимов управления, то вычислитель придает обоим 4ПП функции наборного поля, а кнопкам в обрамлении индикатора присваивает индицируемый на экране двухзначный цифровой код, при наборе которого с использованием двух 4ПП, аббревиатура кнопки обозначается рамкой, которая работает в проблесковом режиме и после нажатия кнопки фиксации действий оператора, кнопка в обрамлении индикатора активируется, а при ошибочном наборе цифрового кода он сбрасывается нажатием кнопки отмены действий оператора, при повторном нажатии кнопки переключения режимов управления оба 4ПП приобретают функции оперативного управления оборудованием подвижного объекта.
Документы, цитированные в отчете о поиске Патент 2022 года RU2773989C1
- Агасаров Г.Б.
- Шевелев Е.Е.
- Безверхний В.Б.
- Коржуев М.В.
- Малов Ю.И.
- Моржин А.М.
- Писков В.В.
- Федоров А.И.
- Кузин В.Б.
- Симонянц С.Л.
- Файнштейн И.З.
Факультет подготовки врачей для Воздушно-космических сил
3-й Факультет (подготовки врачей для Воздушно-космических сил) является структурным подразделением федерального государственного бюджетного военного образовательного учреждения высшего образования «Военно-медицинская академия имени С.М. Кирова» Министерства обороны Российской Федерации. Основан Директивой заместителя Министра обороны – начальника тыла Вооруженных Сил Союза Советских Социалистических Республик от 04 июня 1960 г. Осуществляет образовательную, методическую, научную деятельность, воспитательную работу на основе законодательства Российской Федерации, правовых актов Министерства обороны в области подготовки военно-медицинских специалистов для авиационных формирований и войск противовоздушной обороны Воздушно-космических сил, округов.
За годы своего существования факультет подготовил более трех тысяч авиационных врачей, из них более ста – закончили обучение с Золотой медалью.
В настоящее время во многих лечебных, научных и учебных учреждениях Вооруженных Сил Российской Федерации, ведущих учреждениях медицинской службы Воздушно-космических сил служат выпускники факультета, чья научная и профессиональная деятельность начиналась в период обучения в Академии. Успешно решают задачи на должностях авиационных врачей и специалистов всех видов и родов авиации, в Центре подготовки космонавтов в Звездном городке, выполняли свой интернациональный долг в Афганистане, Чечне, Сирийской арабской республике, и других «горячих точках».
В начало >>>
1. Историческая справка
Появление и развитие в России авиации и космоса заставили дифференцировать медицинские знания и вызвали к жизни новую медицинскую специальность – «Лечебное дело в авиации» с требованиями к подготовке и усовершенствованию авиационных врачей по всему комплексу характерных заболеваний и симптомов, сопровождающих летный труд.
Образование факультета явилось основанием для разработки нового учебного плана и соответствующей учебной программы по авиационной медицине и организации тактики медицинской службы. Увеличение почти в два раза общего времени обучения, приоритет практических занятий и введение государственного экзамена по авиационной медицине и организации тактики медицинской службы существенно улучшили подготовку авиационных врачей по вопросам медицинского обеспечения полетов и контроля за состоянием здоровья летного состава.
Прорыв в космос нашей страны потребовал введения в курс авиационной медицины вопросов космической медицины. Поступление в войска самолетов третьего поколения в 70-х годах, четвертого поколения в 80-х и пятого в 2000-х постоянно требуют от авиационных врачей новых, теоретических знаний и прочных практических навыков по выполнению своих функциональных обязанностей.

ТИХОМИРОВ Борис Викторович
С жизнью академии менялась и жизнь факультета. За 60 лет сменилось целая плеяда руководителей – видных деятелей медицинской науки.
Первым начальником факультета с 1960 по 1964 год стал полковник медицинской службы Тихомиров Борис Викторович.
При нём учебно-методическая работа велась наиболее интенсивно. Проводились предметно-методические комиссии, издавались учебные пособия, совершенствовались учебные планы и программы специалитета.
В дальнейшем факультетом руководили:
-
- полковник медицинской службы Кудрявцев Борис Николаевич (1964 – 1972 гг.),
- подполковник медицинской службы Жирков Иван Иванович (1972 – 1975 гг.),
- генерал-майор медицинской службы Бугров Станислав Алексеевич (1975-1982 гг.),
- генерал-майор медицинской службы Жернавков Владимир Федорович (1982-1992 гг.),
- полковник медицинской службы Афонин Василий Александрович (1992-1998 гг.),
- полковник медицинской службы Лизогуб Игорь Николаевич (1998-2003 гг.),
- полковник медицинской службы Подовинников Дмитрий Константинович (2003- 2008 гг.),
- полковник медицинской службы Бобров Юрий Михайлович (2009-2010 гг.),
- подполковник медицинской службы Бессонов Андрей Валентинович (2010-2019 гг.).

КУДРЯВЦЕВ Борис Николаевич

ЖИРКОВ Иван Иванович

БУГРОВ Станислав Алексеевич

ЖЕРНАВКОВ Владимир Федорович

АФОНИН Василий Александрович

ЛИЗОГУБ Игорь Николаевич

ПОДОВИННИКОВ Дмитрий Константинович

БОБРОВ Юрий Михайлович

БЕССОНОВ Андрей Валентинович
С 2020 года факультетом руководит подполковник медицинской службы Кулеш Сергей Александрович.

КУЛЕШ Сергей Александрович
На протяжении многих лет курсанты и слушатели факультета стабильно показывают отличную и хорошую учебу, особенно по профилирующим направлениям: организации и тактики медицинской службы Воздушно-космических сил, физиологии летного труда, офтальмологии, оториноларингологии и многим другим.
На факультете и профилирующей кафедре авиационной и космической медицины (https://www.vmeda.org/s-02-02/ds-02-01/) ведется научная работа, функционирует научный кружок военно-научного общества курсантов и слушателей. Многие выпускники получили в нем научную и методическую подготовку, навыки организации и проведения экспериментальных исследований, освоили и внедрили в практику специальные методики. Под руководством профессорско-преподавательского состава кафедры, оснащенной передовыми и современными комплексами и оборудованием, кружковцы участвуют в выполнении плановых научно-исследовательских работах, проведении научных и научно-практических конференций, ежегодно участвуют в межвузовской конференции посвященной Дню космонавтики.
Свыше трехсот выпускников факультета стали видными деятелями военной медицины, имеют ученые степени и ученые звания. Среди них: генерал-майор медицинской службы Ушаков И.Б. – ученый с мировым именем в области авиакосмической радиобиологии и экспериментальной медицины, член – корреспондент РАН, академик РАМН, профессор, лауреат премии Совета министров СССР, ранее возглавлявший институт медико-биологических проблем РАН; Бухтияров Игорь Валентинович – заслуженный деятель науки Российской Федерации, член-корреспондент РАН, профессор, директор ФГБНУ «Научно-исследовательский институт медицины труда имени академика Н.Ф. Измерова, ранее – начальник ГосНИИИ военной медицины Минобороны России; полковник медицинской службы Жданько Игорь Михайлович доктор медицинских наук – начальник НИИЦ АКМ и ВЭ МО РФ; полковник медицинской службы Ворона А.А. – профессор, заместитель начальника ГНИИ ВМ МО РФ по научной работе; полковник медицинской службы Хоменко Михаил Николаевич – профессор, начальник НИИЦ авиакосмической медицины и военной эргономики ГНИИИ ВМ МО РФ; Анденко С.А. – ранее депутат Законодательного Собрания Санкт-Петербурга, с 2018 года исполняет обязанности заместителя начальника Военно-медицинской академии имени С.М. Кирова по взаимодействию с органами государственной власти; полковники медицинской службы, профессора Лустин С.И. и Благинин А.А. начальники кафедры авиационной и космической медицины (соответственно с 1995 г. по 2009 г. и с 2009 г. по н.в.); полковник медицинской службы Васильев А.Ю. – член-корреспондент РАМН, профессор, начальник Главного клинического госпиталя МВД; полковник медицинской службы Голофеевский В.Ю. – профессор, ранее начальник кафедры госпитальной терапии; полковник медицинской службы Труфанов Г.Е. – профессор, ранее начальник кафедры рентгенологии и радиологии академии – главный рентгенолог МО РФ; полковник медицинской службы Гриневич В.Б. – профессор, начальник кафедры ТУВ – 2; полковник медицинской службы Сосюкин А.Е.- профессор, ранее начальник кафедры военно-полевой терапии; полковник медицинской службы Пономаренко Г.Н. – профессор, заведующий кафедры физиотерапии и курортологии – главный курортолог МО РФ; полковник медицинской службы Хубулава Г.Г. – профессор, начальник кафедры ХУВ-1; полковник медицинской службы Волжанин В.М. – профессор, ранее начальник кафедры инфекционных болезней; полковник медицинской службы Попов В.И. – декан факультета подготовки и усовершенствования гражданских медицинских (фармацевтических) специалистов Академии; полковник медицинской службы Хоминец В.В. – начальник кафедры и клиники военной травматологии и ортопедии имени Г.И. Турнера, доктор медицинских наук, профессор, главный травматолог МО РФ; полковник медицинской службы Куликов А.Н. – начальник кафедры и клиники офтальмологии имени В.В. Волкова, главный офтальмолог МО РФ, главный внештатный специалист Комитета по здравоохранению Санкт-Петербурга, Член Президиума правления Общества Офтальмологов России, доктор медицинских наук, доцент, Заслуженный врач РФ, полковник медицинской службы. Является председателем Диссертационного совета Военно-медицинской академии имени С.М. Кирова, Членом Общества Euroretina, Членом Общества ESCRS, Членом Санкт-Петербургского научного медицинского общества офтальмологов, а также Членом редакционного совета журнала «Офтальмологические ведомости»; Кузнецов С.М. – заведующий кафедрой общей и военной гигиены, кандидат медицинских наук доцент; полковник медицинской службы Шмидт А.А. – главный гинеколог МО РФ начальник кафедры и клиники акушерства и гинекологии; Башарин В.А. – начальник кафедры военной токсикологии и медицинской защиты доктор медицинских наук профессор полковник медицинской службы главный токсиколог-радиолог МО РФ; и многие другие профессора, доктора и кандидаты медицинских наук, заместители начальников кафедр, доценты, начальники НИИ и лабораторий.

КОТОВ Олег Валериевич

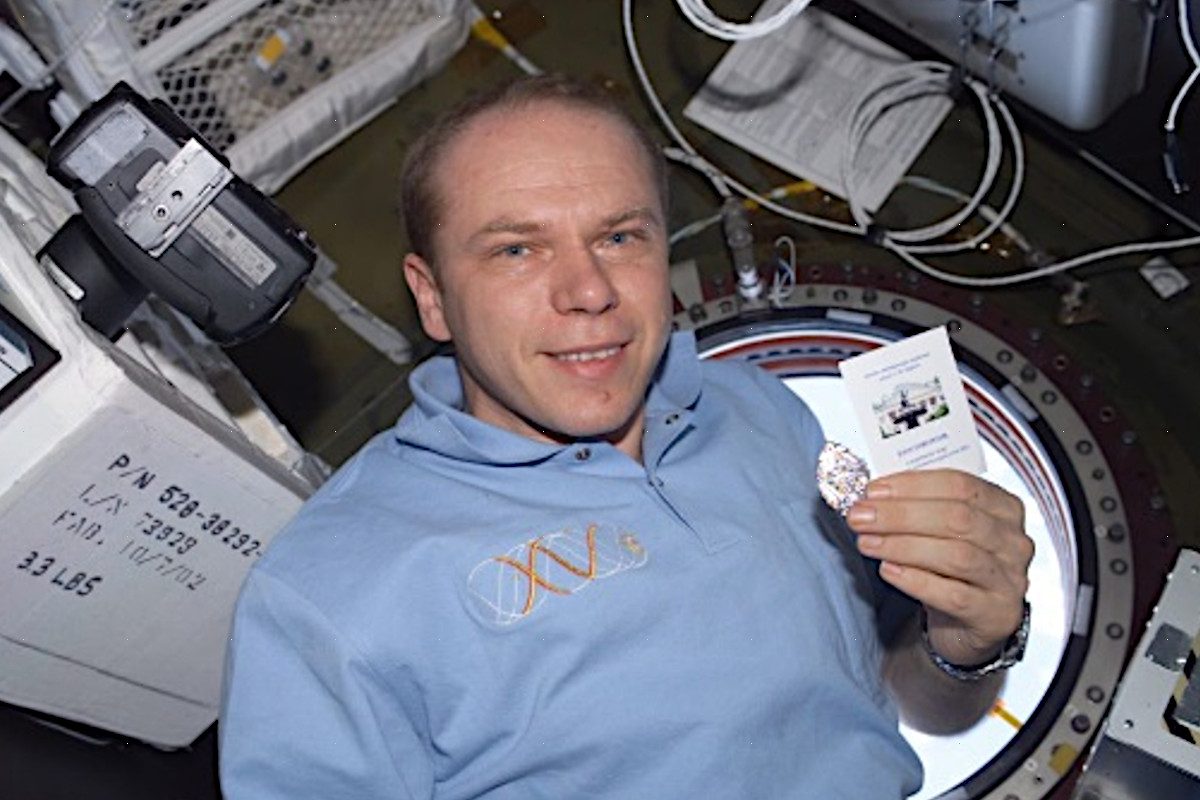
Выпускники факультета распределяются во все уголки России, где взлетают и садятся самолеты, лучшие специалисты – в Москву, в Центр подготовки космонавтов. В 2007 году выпускник 3-го факультета Военно-медицинской академии 1988 года полковник медицинской службы Котов Олег Валериевич стал сотым космонавтом страны. В составе экипажа проработал на орбите более 190 суток, совершил 2 выхода в открытый космос.
Врачи и ранее включались в состав космических экипажей, но впервые космонавт, врач по первой специальности, пилотировал транспортный корабль «Союз-ТМА» в качестве командира экипажа и после стыковки с МКС, в течение почти полугода, выполнял функции бортинженера экипажа МКС-15.

По результатам выполненной на орбите программы КОТОВ Олег Валериевич удостоен высокого звания Героя России
В последующем Олег Валериевич Котов совершил еще два космических полета в качестве командира экипажа космических кораблей Общая продолжительность трёх космических полетов составила более 520 суток. Выполнил 6 выходов в открытый космос. Также 7 раз прошел подготовку в составе дублирующих экипажей.
В дальнейшем Олег Валериевич Котов проходил службу на земле, на должностях начальника Центра пилотируемых программ Центрального научно-исследовательского института машиностроения, и заместителя руководителя по науке Института медико-биологических проблем Российской Академии Наук.
В стенах академии успешно прошла защита диссертации О.В. Котова на соискание ученой степени кандидата медицинских наук по теме: «Гипоксическая тренировка и электроимпульсная нейрорегуляция в системе медицинской реабилитации после воздействия факторов космического полета».
Достойно защищают честь родного факультета в военно-медицинской эстафете наши курсанты, включая международный этап соревнований.
Трудно представить сейчас российскую медицину без выпускников факультета подготовки врачей для Воздушно-космических сил, имеющего за свою сравнительно недолгую историю славные традиции в подготовке медицинских кадров и развитии науки. Эти богатые традиции закладывают авиационные врачи старших поколений, способствуя развитию нацеленности и поддержанию интереса у молодежи к научным направлениям по совершенствованию системы медицинского обеспечения авиационных и космических полетов.
В начало >>>
2. Образовательная деятельность
На факультете проходят обучение:
I. По программам высшего образования (специалитета по специальностям):
-
- «Лечебное дело»;
- «Медико-профилактическое дело»;
- «Фармация».
В начало >>>
3. Фотогалерея
3.1. Рабочие будни на 3 факультете подготовки врачей для Воздушно-космических сил
Особенности обучения по направлению «Авиационная и космическая медицина»

Кто в детстве не мечтал стать космонавтом? Наверное, все малыши грезят о звездном небе и облаках, которые можно коснуться рукой. Для подавляющего большинства взрослых эти фантазии разбиваются о суровую реальность, ведь помимо летчиков, миру нужны еще учителя, строители, инженеры, бухгалтеры и так далее.
Тем не менее, небольшой части целеустремленных людей все-таки удается достичь желаемого и совместить общественно полезную профессию врача с мечтами о небе. Такой шанс выпадает выпускникам, получившим образование по профилю «Авиационная и космическая медицина».

Авиационная и космическая медицина
Уникальные условия работы, повышенная ответственность и нетривиальные задачи, которые постоянно приходится решать авиационным медикам, накладывают на них серьезные обязательства.
Главной задачей такого специалиста является предоставление гарантий безопасного и комфортного полета пассажиров и экипажа. Основной упор делается на профилактические мероприятия, однако авиационным, а тем более космическим, медицинским работникам необходимо всегда сохранять хладнокровие и уметь оказывать первую помощь даже в самых тяжелых условиях.
Для этого доктор должен не просто знать анатомию/физиологию, но и четко понимать, какие процессы происходят в организме человека во время полетов (как в небе, так и на орбите).
Врач авиационной и космической медицины
Круг профессиональных обязанностей доктора, работающего в авиации и космонавтике, обширен:
- полный медицинский контроль экипажа перед полетом и после него (осмотр, оказание неотложной помощи по необходимости, комплектация бортовых аптечек);
- обследование кандидатов на пополнение экипажа;
- профилактика развития хронических состояний, характерных для данной сферы деятельности;
- реализация новых проектов по медицинскому обеспечению персонала, задействованного в космических и авиационных полетах;
- разработка режима работы, питания и прочих индивидуальных схем для членов экипажа;
- обеспечение медицинской поддержки авиационного и космического персонала как на земле, так и на орбите.
- изучение влияния экстремальных нагрузок на организм человека во время полета.
Надо сказать, что это далеко не полный круг ответственности медицинского сотрудника, ведущего деятельность в области авиации и космонавтики. Его рабочие задачи делятся на две основные группы: предупреждение развития заболеваний и оказание неотложной помощи.

Для того чтобы обеспечить выполнение этих обязанностей на высшем уровне, необходимо постоянно совершенствовать как теоретические знания, касающиеся предотвращения проблем со здоровьем у экипажа, так и практические навыки, от которых во время ЧП зависят жизни людей.
Авиационная и космическая медицина обучение
Стать авиационным доктором или специалистом в сфере космонавтики можно, пройдя ординатуру по профилю. К ней допускаются выпускники высших учебных заведений по специалитету «Педиатрия» или «Лечебное дело». Отбор проводится на конкурсной основе.
Люди, которым подойдет данная профессия, обычно интересуются физикой, химией, математикой, биологией. Прекрасным дополнением является знание английского языка.
Во время двух или трехлетнего обучения (военные доктора получают образование дольше) будущий врач познакомится с такими направлениями, как:
- физиология в авиации;
- токсикология в авиации;
- биохимия в авиации;
- психология в авиации;
- гигиена в авиации;
- летная аварийность;
- врачебно-летная экспертиза.
Трудоустроиться дипломированный специалист может в компанию, специализирующуюся на авиаперевозках, организацию космической отрасли, НИИ либо научный центр, занимающийся исследованиями в летной/космической сфере.

Что касается личностных качеств, то медику, задействованному в авиации, не обойтись без:
- высокой обучаемости;
- хладнокровия;
- стрессоустойчивости;
- способности к анализу;
- повышенного чувства ответственности;
- внимательности;
- высокой работоспособности.
Поделиться:
Популярные статьи в категории:
Источник https://patenton.ru/patent/RU2773989C1
Источник https://www.vmeda.org/s-02-01/ds-01-03/
Источник https://www.snta.ru/press-center/osobennosti-obucheniya-po-napravleniyu-aviatsionnaya-i-kosmicheskaya-meditsina/